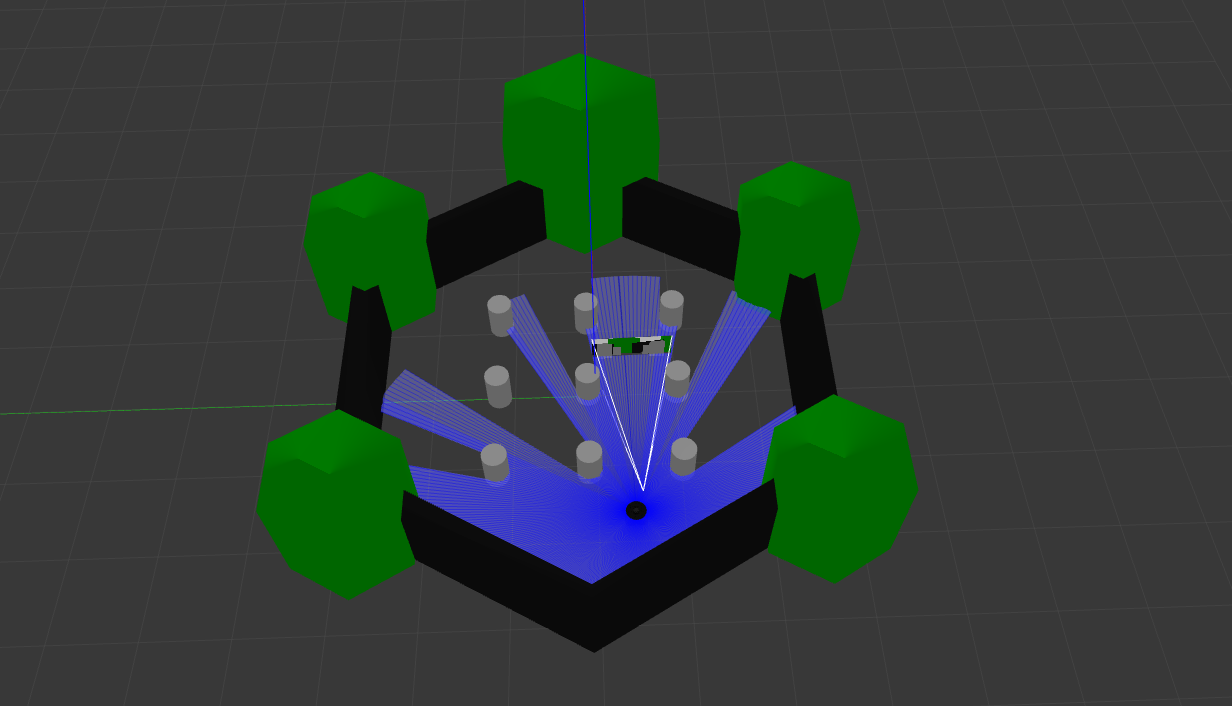
This is the Gazebo ROS2 camera plugin enabled version of Turtlebot 3 Waffle Gazebo model.
- RGB Image
- Depth Image
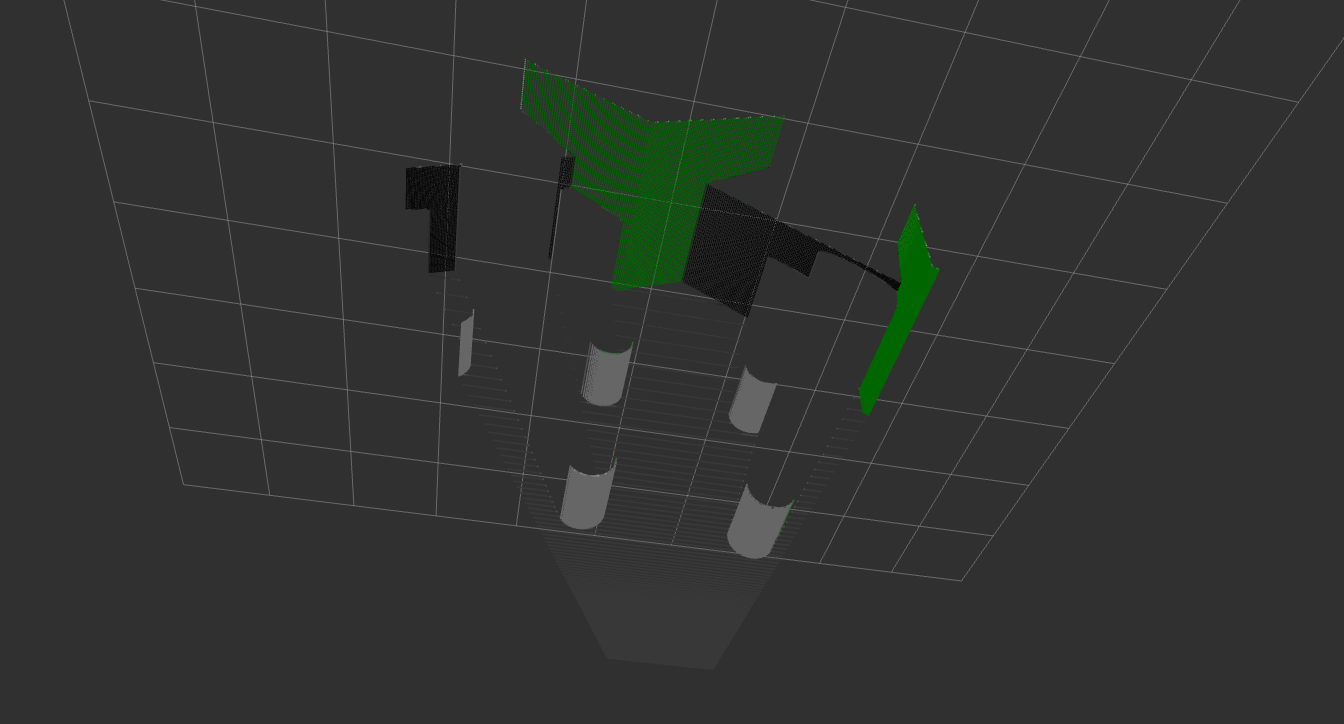
- Point Cloud
Tested using Gazebo 9 and ROS2 Dashing.
- Install ROS2
- Install Gazebo
curl -sSL http://get.gazebosim.org | sh
- Install Gazebo ROS2 Packages
sudo apt install ros-<ros2_distro>-gazebo-*
- Source setup.bash in the ROS2 installation directory
source /opt/ros/<ros2_distro>/setup.bash
- Clone the repository and copy turtlebot3_waffle into
.gazebo/modelsdirectory. It is located in the/homedirectory or where you store your model files suchturtlebot3_simulation/turtlebot3_gazebo/models - Use the urdf with robot state publihser or replace the description file in
turtlebot3_description/urdfwith this urdf file.
- /intel_realsense_r200_depth/camera_info_raw
- /intel_realsense_r200_depth/depth/camera_info
- /intel_realsense_r200_depth/depth/image_raw
- /intel_realsense_r200_depth/image_raw
- /intel_realsense_r200_depth/points
- /intel_realsense_r200_rgb/camera_info
- /intel_realsense_r200_rgb/image_raw
- realsense_depth_frame
- raelsense_rgb_frame