m_preDetect --> m_classify --> m_match --> m_isEnablePredict --> correctTrajectory_and_calcEuler

形成一个历史队列 1.只保留持续时间30帧以内的
if (iter->rTick > 30) {
s_historyTargets.erase(iter, s_historyTargets.end());2.击打策略的选择
- 之前历史记录为空:
找一个离炮台最近的作为
minTarElement
auto minTarElement = std::min_element(
m_targets.begin(), m_targets.end(), [](Target &a_, Target &b_) -> bool {
return cv::norm(a_.ptsInGimbal) < cv::norm(b_.ptsInGimbal);
});- 之前记录不为空:
通过
轮廓匹配和距离匹配寻找上一次的击打对象 该轮廓是目标ROI的四个角点, 感觉不是很靠谱...
distanceA = cv::matchShapes- 改进方向: 提取图像特征 通过一个简单的CNN提取图片特征,然后根据特征值进行匹配,参考DEEPSORT
/**疑问 不知道什么意思*/
if (distanceA > 0.5 ||
(m_1.nu11 + m_1.nu30 + m_1.nu12) * (m_2.nu11 + m_2.nu30 + m_2.nu12) < 0)
continue;-
注意的变量: 炮口坐标系 : cv::Point3d ptsInGimbal; // 物体在云台坐标系下坐标(相机坐标系经过固定变换后得到) 世界坐标系 : cv::Point3d ptsInWorld; // 物体在世界坐标系下坐标
-
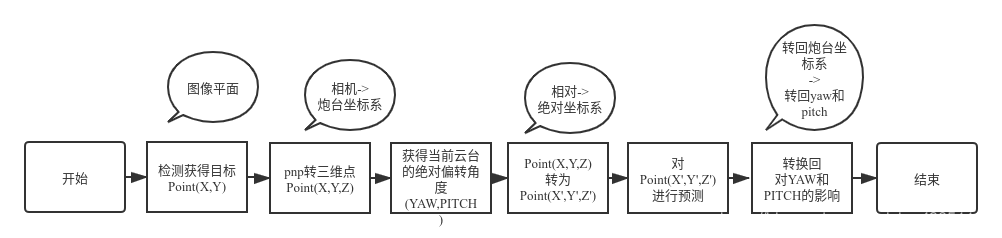
主要思想: 通过kalman filter 对世界坐标系的目标的三维坐标进行预测. 具体流程如下:
获得云台的绝对偏转角度
cpp m_communicator.getGlobalAngle(&gYaw, &gPitch);转到所有的检测物体世界坐标cpp tar.convert2WorldPts(-gYaw, gPitch);对三维坐标点进行预测cpp kalman.correct(s_historyTargets[0].ptsInWorld, timeStamp);
缺点:
考虑到相机和物体的相对运动,三维坐标转换的预测不是那么准确.
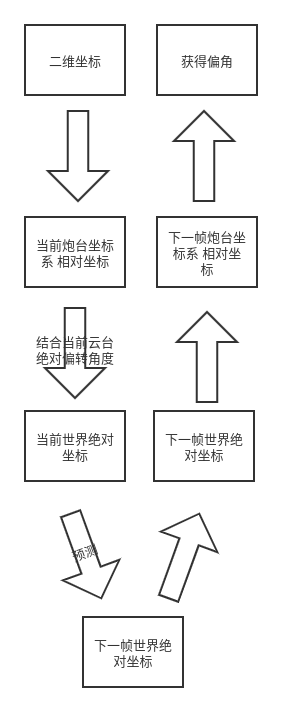
- 主要思想: kalman filter 加上二维预测 对yaw和pitch进行预测!
- 具体流程 1.人工消除畸变 对ROI的四个角点结合相机矩阵和畸变参数进行畸变矫正.
cv::Point2f MyCamera::undistortPoints(cv::Point2f inputPoint)2.等比测距 在分类结束后,进行距离的测量.
//利用灯柱高度计算距离
//实际height
//之前测好的数据 65000
pridectDistance = (ushort)(65000. / height);3.目标的获得绝对偏转角度
/**
* @函数: caculateTargetPose
* @描述: 得到目标的世界坐标
* @输入: Point2f angle 敌方与摄像头成像平面中垂线的角度(x,y)
cv::Mat tvecDeviation 枪管到摄像头的平移矩阵
float distance 敌方距离
double timestamp 此时的时间
* @输入输出:cv::Point2f &targetPose 敌方世界坐标
* @返回: bool 成功转换
*/
bool caculateTargetPose(cv::Point2f angle, cv::Mat tvecDeviation, float distance, double timestamp, cv::Point2f &targetPose);以下是caculateTargetPose的具体步骤:
- 先二维坐标转云台相对偏转角度
cv::Point2f MyCamera::pix2angle(cv::Point2f point, bool shoot42)- 然后运用线性插值预测云台当前绝对偏转情况,存放于
GimblaPose gimblaPose
/**
* @函数: interpolateRobotPose
* @描述: 根据时间对云台值进行插值
* @输入: double timestamp 此刻时间
GimblaPose &pose 云台状态
*/
bool interpolateRobotPose(double timestamp, GimblaPose &pose);- 拿距离和二维偏转角度构建相对三维坐标与修正后的相对偏转角度
/**构建相对三维坐标*/
tvec.at<float>(0, 0) = (float)distance * tan(angle.x / 180 * CV_PI) + tvecDeviation.at<float>(0, 0);
tvec.at<float>(0, 1) = (float)distance * tan(angle.y / 180 * CV_PI) + tvecDeviation.at<float>(0, 1);
tvec.at<float>(0, 2) = (float)distance + tvecDeviation.at<float>(0, 2);
/**修正后的偏转角度*/
Point2f correctedAngle;
correctedAngle.x = atan2(tvec.at<float>(0, 0), tvec.at<float>(0, 2)) * 180 / CV_PI;
correctedAngle.y = atan2(tvec.at<float>(0, 1), tvec.at<float>(0, 2)) * 180 / CV_PI;- 然后得到目标的绝对偏转角度
targetPose.x = gimblaPose.yaw - correctedAngle.x ;
targetPose.y = gimblaPose.pitch - short(correctedAngle.y * 8192. / 360.);最后使用kalman对二维pitch 和 yaw进行预测!
/**
* @函数: kalmanPredict
* @描述: 对绝对坐标进行预判
* @输入: float yaw 装甲板所在的yaw角度值
float pitch 装甲板所在的pitch编码值
float time 预判时长
* @返回:Point2f 预测后云台的yaw,pitch
*/
cv::Point2f kalmanPredict(float yaw, float pitch, float time);- 对比:
只对yaw进行了kalman预测
无预测...
无预测...
/**
* @brief kalman filter for point. never use
*/
void ArmorPredict::Classical_kalman(Kalman4Point &KF)但是有许多值得学习的地方 1.三相机加三线程
std::thread af1(&ArmorFind::process,FinderLeft,contours_left,std::ref(left),std::ref(leftout),std::ref(ArmorLeftResult),false);
std::thread af2(&ArmorFind::process,FinderRight,contours_right,std::ref(right),std::ref(rightout),std::ref(ArmorRightResult),false);
af1.join();
af2.join();
双目定位:
void StereoXML::Calculation(const Point &left,const Point &right,AbsPosition &Position){
//std::cout<<"left y position:"<<left.y<<std::endl;
VisionDis = left.x - right.x;
Position.z = Param.distance_const/VisionDis;
Position.x = (left.x - Param.width/2)*Position.z/Param.f;
Position.y = (Param.lightbase- left.y)*Position.z/Param.f;
}2.比赛中对相机的动态调整
/**根据距离调整分辨度**/
if(Predictor.Data.z.f > 2500 && videotype == 1280){
vtrans_count++;
if(vtrans_count > 10){
videotype = 1920;
/**开启左右(上 不一定)摄像头*/
CamSetMode(capleft,capright,capup,1920,capstatus[2]);
vtrans_count = 0;
std::cout<<"format:1920"<<std::endl;
}
}else if((Predictor.Data.z.f < 2000) && (Predictor.Data.z.f > 1) && (videotype == 1920)){
vtrans_count++;
if(vtrans_count > 20){
videotype = 1280;
CamSetMode(capleft,capright,capup,1280,capstatus[2]);
vtrans_count = 0;
std::cout<<"format:1280"<<std::endl;
}
}else{
vtrans_count = 0;
}
}else{
if(videotype != 1280){
videotype = 1280;
CamSetMode(capleft,capright,capup,1280,capstatus[2]);
std::cout<<"format:1280"<<std::endl;
}
}3.根据机器人等级调节弹道补偿
void ArmorPredict::AngleFit(const AbsPosition input,float *pitch,float *yaw,float *shootspd,int level){
...
int shootspeedmax;
// max bullet speed:
// level 0 / level 1: 22m/s
// level 2 : 25m/s
// level 3 : 28m/s
switch(level){
case 0:
case 1:shootspeedmax = 22;break;
case 2:shootspeedmax = 25;break;
case 3:shootspeedmax = 28;break;
}
}4.自启使用了看门狗WatchDog
1.三线程 产生一个信息队列
依次获取图片 处理图片
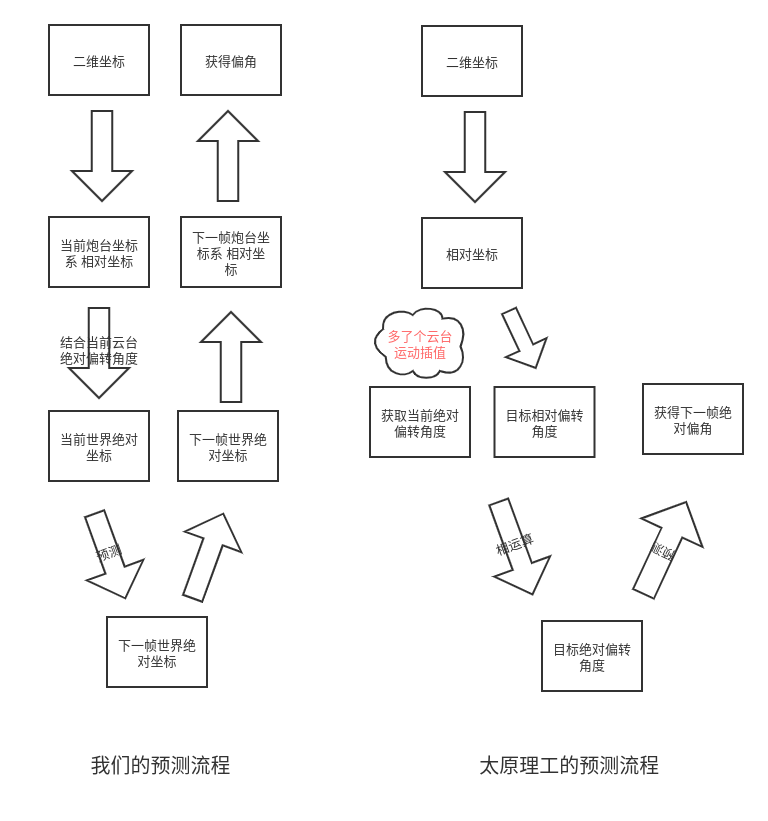
和太原理工类似 https://zhuanlan.zhihu.com/p/38745950
借鉴太原理工的思想 试图通过对角度进行预测!
不易测试,需要与电控结合!