Project Proposal
##Summary# The goal of this project is to create, and produce a emergency vehicle that will be able to locate its position in a know building space, to navigate around that known building. Each bot will be integrated into a single network which will allow the bots to work together to quickly respond to any emergency situation.
###Overview For early stages it will be a little less than a yard square and very short. This will allow the use of various attachments to the top that can serve many different needs. These won't be built or designed in this project due to the limitations of time and resources.
###Hardware Cameras should be spaced at the widest possible portion of the vehicle, allowing for easier triangulation. It will also have a ultrasonic sensor on board to simplify the image recognition and to ensure that it can quickly react to close objects. Image recognition and control must be done through a computing system capable of relatively high-speed I/O between the cameras and vehicle, this will take the form of an on-board laptop. (see [Hardware Research](Hardware Design and Acquisition))
###Resources A limiting factor on this project will be funding. A suitable vehicular platform must be obtained, capable of sustaining the items listed earlier. Existing personal or school-owned laptops can be used as suitable computing systems for the platform, but appropriate I/O hardware and other power and control sources must be obtained or built.
#Software
###Languages and Modules Current plans assume the primary use of Python as the primary programming language,. Cython, a C extension for python, can be used to speed up calculations and processes, this will be reserved for the image recondition phase, and maybe for the use in the AI. Image recognition can be done through the use of SimpleCV, a Python Image module that excels in image handling and blob recognition, upon which patterns can be determined.
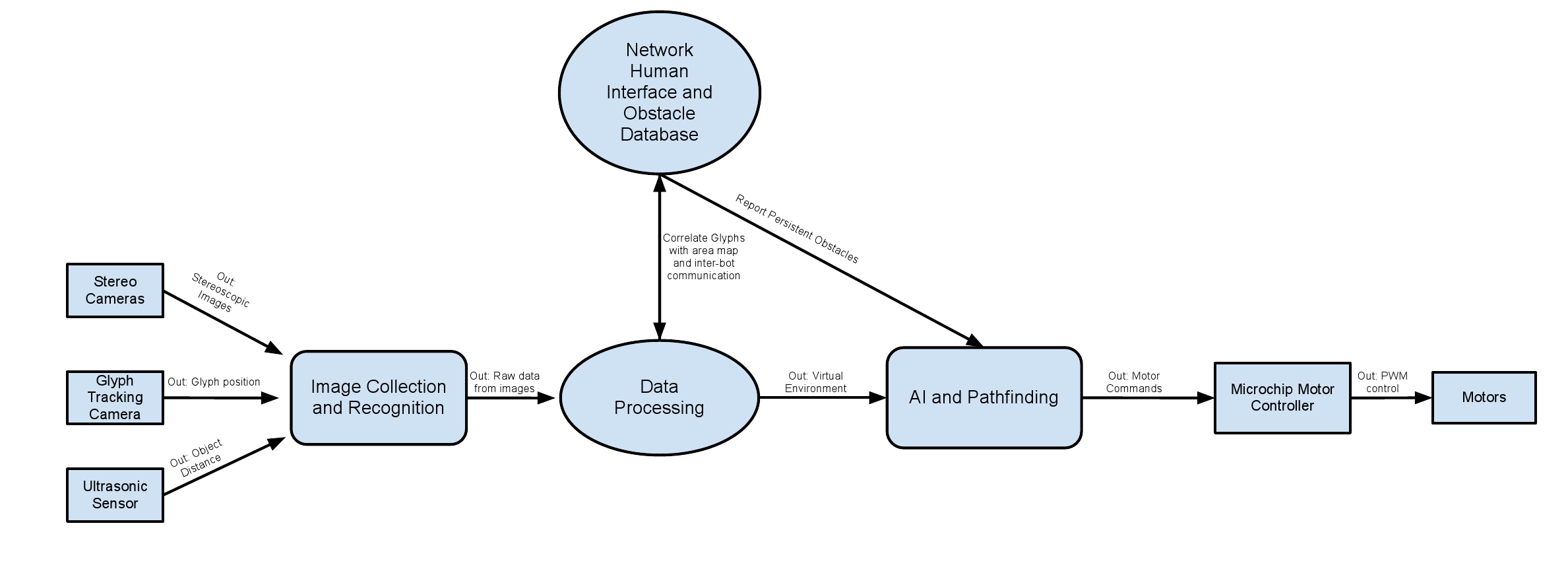
###Features A fully autonomous system must have a tracking module capable of identifying threats, obstacles, and guidelines, as well as a control system. The tracking module must be able to determine the movement and positions of potential obstructions, such as people, and static objects. The tracking system also must also be capable of Optical Glyph Tracking, for determining its position in the building. A object-finding system also needs to use subsequent frames to identify and plot the courses of nearby object to prevent collisions from motion or unknown hazards. A processing module will take incoming raw data from the tracking module and turn it into a comprehensive virtual environment for the system. Also, the processing module will communicate with a networked server to upload current objects and update the persistent obstacle database. The control system uses an incoming virtual environment to facilitate obstacle avoidance, and Glyph tracking. The AI must also plot an appropriate path that is conducive to safe and efficient navigation of hallways. Further, the control system must be able to handle non-standard driving conditions and take appropriate action, such as stopping to allow doctors to go by. The network system will take and display live data from robots for the ease of human operation and maintenance. Also, it will designate and identify jobs for each vehicle, and construct an initial path for it based on known traffic and hallway data. Further, the network will compile a list of persistent and current obstacles determined by previous robot encounters, which can be transferred to each vehicle for tracking help.
(see Project Research)
#Testing In order to determine the viability and stability of the autonomous module, it needs to be tested in a controlled and safe environment. For the purposes of this experiment, the eCar will be a less than a square yard car (see Hardware, above) mounted with minimal systems. We will be able to test throughout our school which is really close to the standard conditions it will be operating in.