全屏可以解决像素不对应的问题!
在任意tick函数或者其他函数添加以下的命令:
struct DepthPixel //定义深度像素结构体
{
float depth;
char stencil;
char unused1;
char unused2;
char unused3;
};
float* cpuDataPtr; // Texture深度值数组首地址
TArray<DepthPixel> mydata; //最终获取色深度值数据
FIntPoint buffsize; //深度长宽大小X和Y
ENQUEUE_RENDER_COMMAND(ReadSurfaceFloatCommand)( // 将读取深度数据的命令推给渲染线程进行执行
[&cpuDataPtr, &mydata, &buffsize](FRHICommandListImmediate& RHICmdList) //&cpuDataPtr, &mydata, &buffsize为传入的外部参数
{
FSceneRenderTargets::Get(RHICmdList).AdjustGBufferRefCount(RHICmdList, 1);
FTexture2DRHIRef uTex2DRes = FSceneRenderTargets::Get(RHICmdList).GetSceneDepthSurface();
buffsize = uTex2DRes->GetSizeXY();
uint32 sx = buffsize.X;
uint32 sy = buffsize.Y;
mydata.AddUninitialized(sx * sy);
uint32 Lolstrid = 0;
cpuDataPtr = (float*)RHILockTexture2D(uTex2DRes,0,RLM_ReadOnly,Lolstrid,true); // 加锁 获取可读depth Texture深度值数组首地址
memcpy(mydata.GetData(), cpuDataPtr, sx * sy * sizeof(DepthPixel)); //复制深度数据
RHIUnlockTexture2D(uTex2DRes, 0, true); //解锁
FSceneRenderTargets::Get(RHICmdList).AdjustGBufferRefCount(RHICmdList, -1);
});
FlushRenderingCommands(); //等待渲染线程执行
mydata; //最终获取深度数据最终返回的mydata数据就是最终的深度值数组,其中每个深度值的结构是DepthPixel,其中一个成员为depth,另外四个不不使用。其中使用上面的几个命令需要添加"RHI.h"和"RHIResources.h"头文件。
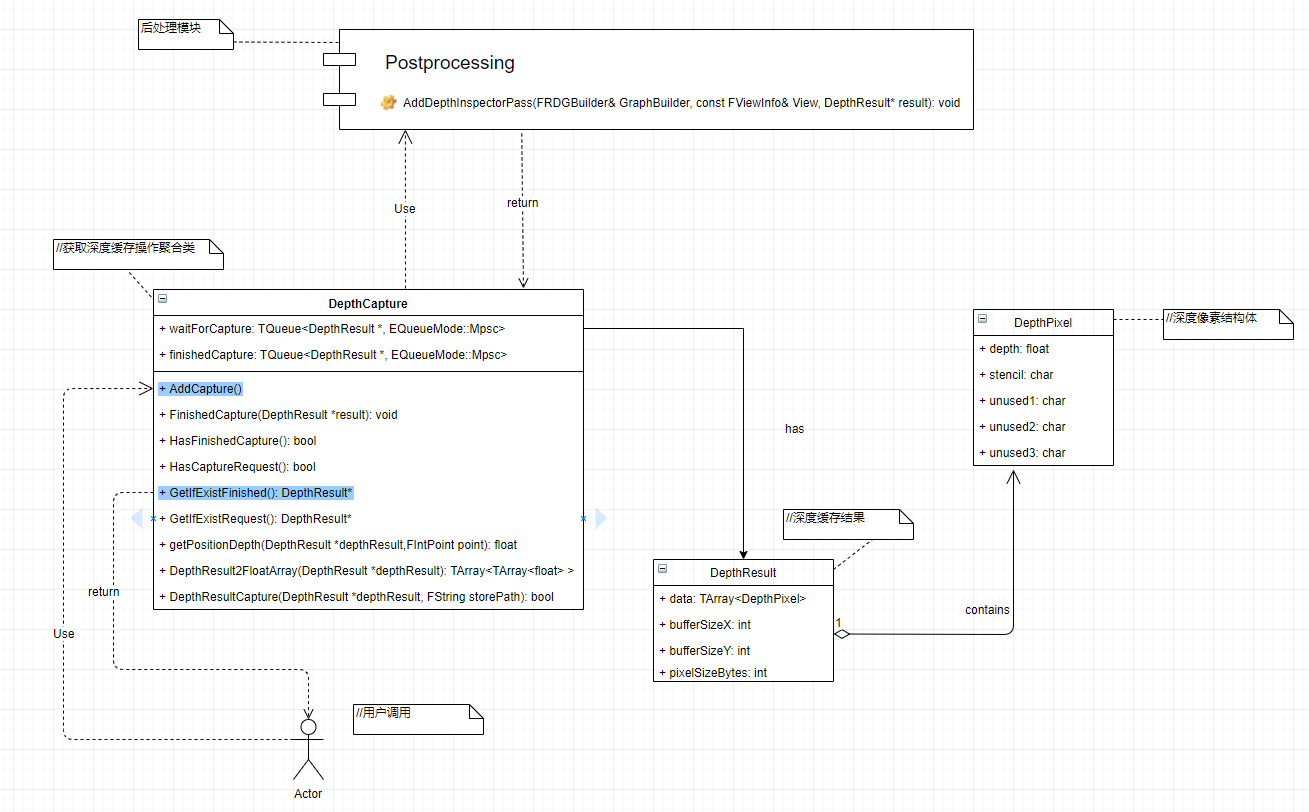
UML图:
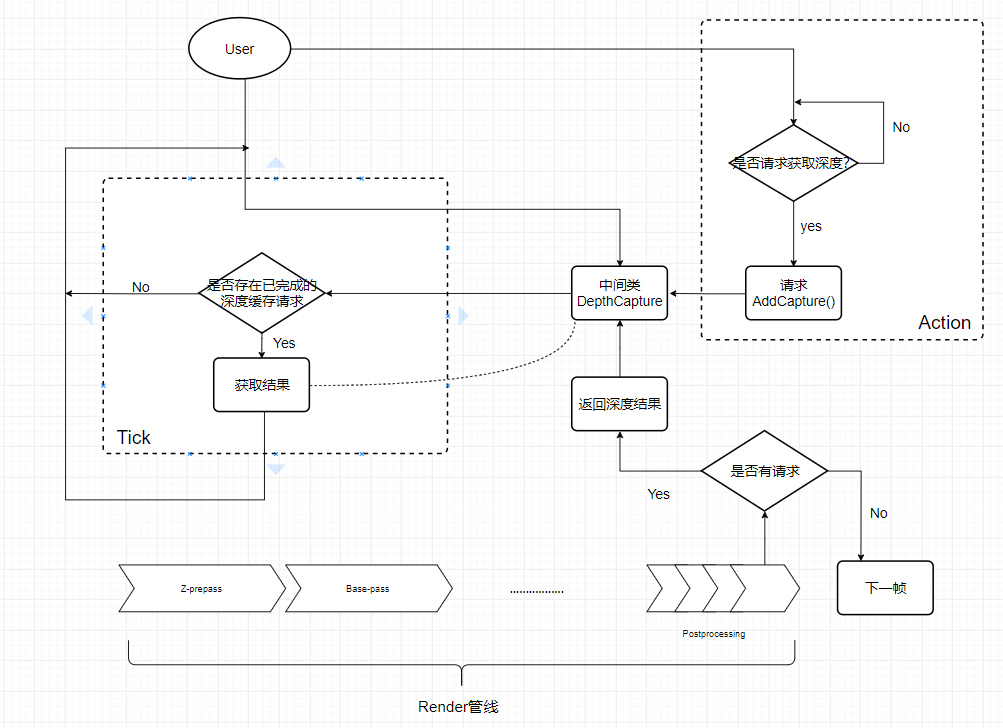
流程图:
添加引擎源码地址
// 添加引擎源码地址
string EnginePath = "C:/Program Files (x86)/UE4+VS2017/UnrealEngine/";
PrivateIncludePaths.AddRange(
new string[] {
EnginePath + "Source/Runtime/Renderer/Private",
EnginePath + "Source/Runtime/Renderer/Private/CompositionLighting",
EnginePath + "Source/Runtime/Renderer/Private/PostProcess"
}
);添加引依赖项

将下面类代码复制到PostProcessing.h文件任意位置:
/*****************************************Get Depth Class***********************************************/
/* 存储一个像素的缓存
depth 深度缓存
stencil (抠图缓存)*/
struct DepthPixel
{
float depth;
char stencil;
char unused1;
char unused2;
char unused3;
};
/* 存储整个视窗的缓存
data 像素缓存数组
bufferSizeX 缓存大小X
bufferSizeY 缓存大小Y
pixelSizeBytes 像素缓存字节数*/
struct DepthResult
{
TArray<DepthPixel> data;
int bufferSizeX;
int bufferSizeY;
int pixelSizeBytes;
};
/* 获取深度缓存的类 */
class RENDERER_API DepthCapture
{
public:
/* 静态成员,当用户发出一个获取深度缓存的请求后,waitForCapture长度加1,新增DepthResult内容为空
当系统完成一个深度缓存的请求后,waitForCapture长度减一 */
static TQueue<DepthResult *, EQueueMode::Mpsc> waitForCapture;
/* 静态成员,当系统完成一个深度缓存的请求后,finishedCapture长度加1,
新增DepthResult含有深度缓存信息 */
static TQueue<DepthResult *, EQueueMode::Mpsc> finishedCapture;
public:
/*用户发出一个获取深度缓存的请求时调用*/
static void AddCapture()
{
waitForCapture.Enqueue(new DepthResult());
}
/*系统完成一个深度缓存请求后调用*/
static void FinishedCapture(DepthResult *result)
{
finishedCapture.Enqueue(result);
}
/*返回是否存在已经完成的请求*/
static bool HasFinishedCapture()
{
return !finishedCapture.IsEmpty();
}
/*如果存在已完成的请求,返回一个深度结果*/
static DepthResult* GetIfExistFinished()
{
DepthResult* result = NULL;
if (!finishedCapture.IsEmpty())
{
finishedCapture.Dequeue(result);
}
return result;
}
/*返回是否存在等待系统执行的请求*/
static bool HasCaptureRequest()
{
return !waitForCapture.IsEmpty();
}
/*如果存在待完成的请求,返回一个深度结果(为空)*/
static DepthResult* GetIfExistRequest()
{
DepthResult* result = NULL;
if (!waitForCapture.IsEmpty())
{
waitForCapture.Dequeue(result);
}
return result;
}
/////////////////////辅助方法////////////////////////
/********** 获取某一点的深度数据,返回float
depthResult 深度数据结果
point 屏幕某个点的位置*/
static float getPositionDepth(DepthResult *depthResult,FIntPoint point) {
return depthResult->data[point.Y * depthResult->bufferSizeX + point.X].depth;
}
/********** 深度数据转化为二维浮点数组,返回float的二维数组
depthResult 深度数据结果*/
static TArray<TArray<float> > DepthResult2FloatArray(DepthResult *depthResult) {
TArray<TArray<float> > result;
for (size_t i = 0; i < depthResult->bufferSizeY; ++i)
{
TArray<float> line;
for (size_t j = 0; j < depthResult->bufferSizeX; ++j)
{
line.Add(depthResult->data[i * depthResult->bufferSizeX + j].depth);
}
result.Add(line);
}
return result;
}
/********** 将深度结果转化为bmp灰度图,返回是否存储成功的bool值
depthResult 深度数据结果
storePath 存储路径,名字后缀必须为.bmg*/
static bool DepthResultCapture(DepthResult *depthResult, FString storePath) {
bool imageSavedOk = false;
TArray<FColor> RawPixels;
RawPixels.AddUninitialized(depthResult->bufferSizeX * depthResult->bufferSizeY);
for (uint64 i = 0; i < depthResult->bufferSizeX * depthResult->bufferSizeY; ++i)
{
// Switch Blue changes.
uint8 v = depthResult->data[i].depth * 10000000;
const uint8 PR = v > 255 ? 255 : v;
RawPixels[i].B = PR;
}
// 保存为灰度图
imageSavedOk = FFileHelper::CreateBitmap(*storePath, depthResult->bufferSizeX, depthResult->bufferSizeY, RawPixels.GetData());
return imageSavedOk;
}
//friend void AddPostProcessingPasses(FRDGBuilder& GraphBuilder, const FViewInfo& View, const FPostProcessingInputs& Inputs);
};
/*****************************************end******************************************************/将下面类中静态成员初始化和添加执行获取代码代码复制到PostProcessing.cpp文件任意位置:
/*类静态成员的定义*/
TQueue<DepthResult *, EQueueMode::Mpsc> DepthCapture::waitForCapture;
TQueue< DepthResult *, EQueueMode::Mpsc> DepthCapture::finishedCapture;
/*获取深度缓存*/
void AddDepthInspectorPass(FRDGBuilder& GraphBuilder, const FViewInfo& View, DepthResult* result)
{
RDG_EVENT_SCOPE(GraphBuilder, "DepthInspector");
{
// 获取渲染对象
FSceneRenderTargets& renderTargets = FSceneRenderTargets::Get(GRHICommandList.GetImmediateCommandList());
// 定义拷贝参数
uint32 striped = 0;
FIntPoint size = renderTargets.GetBufferSizeXY();
result->bufferSizeX = size.X;
result->bufferSizeY = size.Y;
result->pixelSizeBytes = sizeof(DepthPixel);
result->data.AddUninitialized(size.X * size.Y);
// 获取视窗某一帧的深度缓存对象
FRHITexture2D* depthTexture = (FRHITexture2D *)renderTargets.SceneDepthZ->GetRenderTargetItem().TargetableTexture.GetReference();
// 执行拷贝深度缓存操作,将GPU显存中的缓存信息拷贝到CPU内存中,返回指向这块CPU内存的首地址
void* buffer = RHILockTexture2D(depthTexture, 0, EResourceLockMode::RLM_ReadOnly, striped, true);
// 将缓存结果拷贝到result,用于输出
memcpy(result->data.GetData(), buffer, size.X * size.Y * 8);
// 必须执行解锁语句,否则被锁住的GPU缓存信息将不能释放
RHIUnlockTexture2D(depthTexture, 0, true);
// 拷贝结果入队
DepthCapture::FinishedCapture(result);
}
}
////////////////////////////////////////PostProcessing.cpp中该位置添加以下代码:

代码如下:
// Capture depth buffer,otherwise the buffer will be changed
if (DepthCapture::HasCaptureRequest())
{
DepthResult *reuslt;
reuslt = DepthCapture::GetIfExistRequest();
if (reuslt)
{
AddDepthInspectorPass(GraphBuilder, View, reuslt);
}
}绑定一个事件(Action)发出获取深度缓存数据的请求,事件的函数如下,发出请求:
void captureDepth() {
DepthCapture::AddCapture(); // 发出获取深度缓存的请求
}在Tick函数中检查是否完成深度缓存的获取,完成之后可以获取;使用以下的代码可以获取深度值,获取的结果为result:
void Tick(float DeltaTime)
{
// 如果存在已完成的深度缓存请求
if (DepthCapture::HasFinishedCapture())
{
DepthResult *result;
// 获取已完成的深度缓存结果
result = DepthCapture::GetIfExistFinished();
if (result)
{
int n = result->data.Num();
//this is test
GEngine->AddOnScreenDebugMessage(-1, -1, FColor::Blue, FString::Printf(TEXT("Get Depth Size: %d "), n));
/* 相关辅助函数
TArray<TArray<float> > floatResult = DepthCapture::DepthResult2FloatArray(result); // 深度结果转化为二维浮点数组
bool saveImageOk = DepthCapture::DepthResultCapture(result, "D://depth.bmp"); // 保存深度灰度图
float positionDepth = DepthCapture::GetPositionDepth(result, FIntPoint(500,500)); // 获取某一点的深度值
*/
}
}
}使用UE绑定一个时间函数来进行深度图的输出,保存为一个bmp图,事件函数如下:
void [YourClass]::CaptureToggle() {
struct DepthPixel
{
float depth;
char stencil;
char unused1;
char unused2;
char unused3;
};
float* cpuDataPtr;
TArray<DepthPixel> mydata;
FIntPoint buffsize;
ENQUEUE_RENDER_COMMAND(ReadSurfaceFloatCommand)(
[&cpuDataPtr, &mydata, &buffsize](FRHICommandListImmediate& RHICmdList)
{
FSceneRenderTargets::Get(RHICmdList).AdjustGBufferRefCount(RHICmdList, 1);
uint32 Lolstrid = 0;
FTexture2DRHIRef uTex2DRes = FSceneRenderTargets::Get(RHICmdList).GetSceneDepthTexture();
buffsize = uTex2DRes->GetSizeXY();
cpuDataPtr = (float*)RHILockTexture2D(
uTex2DRes,
0,
RLM_ReadOnly,
Lolstrid,
true);
// buff大小
uint32 sx = buffsize.X;
uint32 sy = buffsize.Y;
mydata.AddUninitialized(sx * sy);
memcpy(mydata.GetData(), cpuDataPtr, sx * sy * sizeof(DepthPixel));
RHIUnlockTexture2D(uTex2DRes, 0, true);
FSceneRenderTargets::Get(RHICmdList).AdjustGBufferRefCount(RHICmdList, -1);
});
FlushRenderingCommands();
TArray<FColor> RawPixels;
RawPixels.AddUninitialized(buffsize.X * buffsize.Y);
for (uint64 i = 0; i < buffsize.X * buffsize.Y; ++i)
{
// Switch Blue changes.
uint8 v = mydata[i].depth * 10000000;
const uint8 PR = v > 255 ? 255 : v;
RawPixels[i].B = PR;
}
FString finfo = "D:\\aDepth.bmp"; // 输出图片路径
bool imageSavedOk = FFileHelper::CreateBitmap(*finfo, buffsize.X, buffsize.Y, RawPixels.GetData()); // 输出灰度图
if (imageSavedOk)
GEngine->AddOnScreenDebugMessage(-1, 4, FColor::Red, FString::Printf(TEXT("Depth Image capture Ok!")));
}输出图片验证:
