Autoware package based on IMM-UKF-PDA tracker.
- From a sourced terminal:
roslaunch lidar_tracker imm_ukf_pda_tracker.launch
- From Runtime Manager:
Computing Tab -> Detection/ lidar_detector -> imm_ukf_pda_tracker
A. Arya Senna Abdul Rachman, 3D-LIDAR Multi Object Tracking for Autonomous Driving. 2017. paper
M. Schreire, Bayesian environment representation, prediction, and criticality assessment for driver assistance systems. 2017. paper
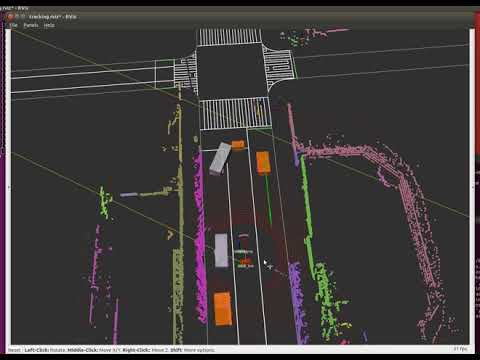
eucledian_clusternode.ray_ground_filternode./tftopic. Below video is from Suginami data which contais /tf topic: (autoware-20180205150908.bag). You can download it from ROSBAG STORE for free. Otherwise, you need to do localization with a map to produce /tf topic fromvelodynetoworld.wayareainfo from vectormap if is possible.
Launch file available parameters for imm_ukf_pda_tracker
| Parameter | Type | Description |
|---|---|---|
input topic |
String | Input topic(type: autoware_msgs::CloudClusterArray). Default /cloud cluster. |
output topic |
String | Output topic(type: autoware_msgs::CloudClusterArray). Default /tracking_cluster_array. |
pointcloud frame |
String | Pointcloud frame. Default velodyne. |
life time thres |
Int | The minimum frames for targets to be visualized. Default 8. |
gating thres |
Double | The value of gate threshold for measurement validation. Default 9.22. |
gate probability |
Double | The probability that the gate contains the true measurement. Default 0.99. |
detection probability |
Double | The probability that a target is detected. Default 0.9. |
distance thres |
Double | The distance threshold for associating bounding box over frames. Default 100. |
static velocity thres |
Double | The velocity threshold for classifying static/dynamic. Default 0.5. |
velocity_explosion thres |
Double | The threshold for stopping kalman filter update. Default 1000. |
use_sukf |
bool | Use standard kalman filter. Default false. |
is_debug |
bool | Turning on debu mode. Publishing rosmarkers for debug. Default false. |
Launch file available parameters for visualize_detected_objects
| Parameter | Type | Description |
|---|---|---|
input_topic |
String | Input topic(type: autoware_msgs::CloudClusterArray). Default /tracking_cluster_array. |
pointcloud frame |
String | Pointcloud frame. Default velodyne. |
Node: imm_ukf_pda_tracker
| Topic | Type | Objective |
|---|---|---|
/detection/lidar_objects |
autoware_msgs::DetectedObjectArray |
Segmented pointcloud from a clustering algorithm like eucledian cluster. |
/tf |
tf |
Tracking objects in world coordinate. |
Node: visualize_detected_objects
| Topic | Type | Objective |
|---|---|---|
/detected_objects |
autoware_msgs::DetectedObjectArray |
Objects with tracking info. |
Node: imm_ukf_pda_tracker
| Topic | Type | Objective |
|---|---|---|
/detected_objects |
autoware_msgs::DetectedObjectArray |
Added info like velocity, yaw ,yaw_rate and static/dynamic class to DetectedObject msg. |
/bounding_boxes_tracked |
jsk_recognition_msgs::BoundingBoxArray |
Visualze bounsing box nicely in rviz by JSK bounding box. Label contains information about static/dynamic class |
Node: visualize_detected_objects
| Topic | Type | Objective |
|---|---|---|
/detected_objects/velocity_arrow |
visualization_msgs::Marker |
Visualize velocity and yaw of the targets. |
/detected_objects/target_id |
visualization_msgs::Marker |
Visualize targets' id. |
Please notice that benchmark scripts are in another repository. You can tune parameters by using benchmark based on KITTI dataset. The repository is here.